Exploration
Karstdive Discovery Documentry
Karstdive 95 was a joint research and exploration project conducted by the Woodville Karst Plain Project (WKPP) and (SAD) in cooperation with the International Research and Application Center for Karst Water Resources (UKAM) of Hacettepe University, Ankara, Turkey, the University of Wyoming Department of Geology and Geophysics (UWG&G) of Wyoming, USA, the State Hydraulic Works (DSI) of Antalya, Turkey, and Kepez Electric Company also of Antalya.
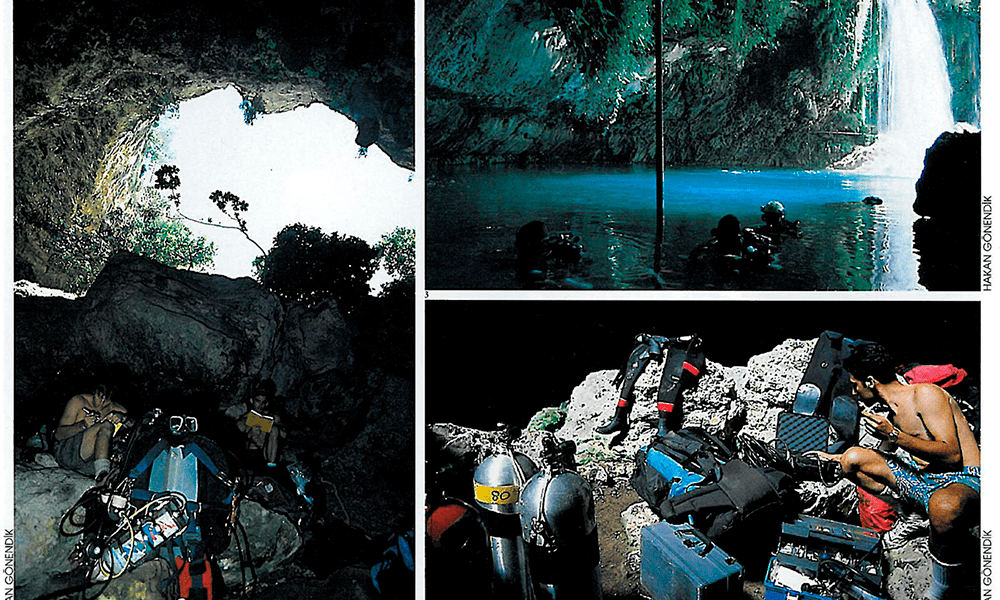
Karstdive 95 was a joint research and exploration project conducted by the Woodville Karst Plain Project (WKPP) and (SAD) in cooperation with the International Research and Application Center for Karst Water Resources (UKAM) of Hacettepe University, Ankara, Turkey, the University of Wyoming Department of Geology and Geophysics (UWG&G) of Wyoming, USA, the State Hydraulic Works (DSI) of Antalya, Turkey, and Kepez Electric Company also of Antalya. The goal was to explore, map, and document several underwater cave systems along the southern flank of the Taurus Mountains. Both UKAM and UWG&G were particularly interested in gaining a better understanding of the regional groundwater flow system near Antalya. DSI and Kepez Electric hoped to learn how to increase the water supply to the Antalya region. You can read more about the Karstdive Project in
Click the image below to watch the video.

Watch more DiveGUE.tv videos on InDepth.
DiveGUE.tv was created to provide a supplementary educational platform for scuba diving enthusiasts. We believe these materials will increase global awareness of GUE training, thereby inspiring divers from around the world to establish and maintain a unified perspective, help ease diver anxiety, enhance class readiness, aid in skill maintenance, and encourage otherwise undecided or unsure divers to seek out training.
DiveGUE.tv is a production of Global Underwater Explorers (GUE), the 501(c)(3) nonprofit committed to high-quality diver education and to exploration and conservation of the world’s aquatic environments. Learn more.



































Dial In Your DCS Risk with the Thalmann Algorithm

Deep Tunnel Workers Go Trimix

La Grande Dérive

California Dreamin’

British Invasion—Thailand Karst Edition 2024

Harnessing the Power of ‘Educated’ AI to Improve Diving Safety